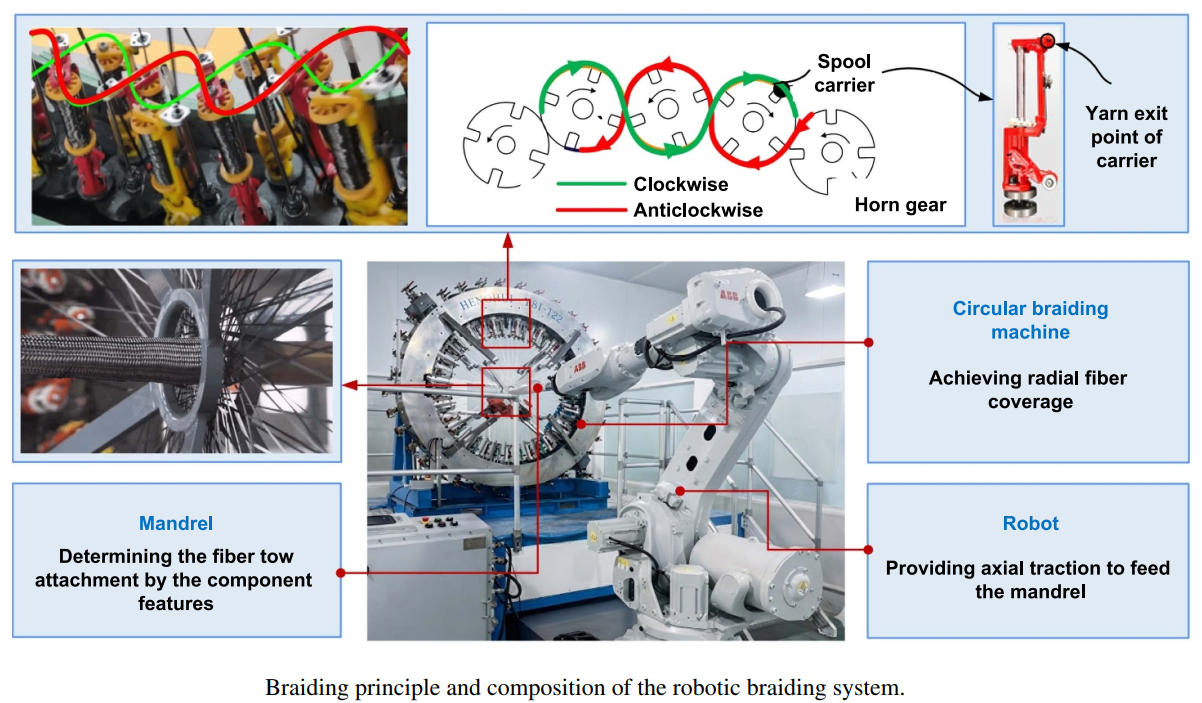
航空航天、国防军工、轨道交通、新能源装备等领域对大型轻量化高性能复合材料结构件的需求日益增长,机器人环形编织是实现大型变曲率复合材料结构件高效制造的重要技术路径。然而,随着构件由简单回转体向复杂异形结构发展,现有编织制造仍面临几何复杂性分类不清、建模方法适用边界不明、尺度效应与动态耦合机制认识不足等问题,制约了大型复杂复合材料构件的成形精度与制造可靠性。
近日,浙江理工大学机械工程学院、全省柔性功能材料智能制造装备重点实验室李秦川教授团队在大型复杂异形复合材料机器人编织制造研究方面取得新进展,相关成果以“A comprehensive review on manufacturing large composites with complex irregular geometry by circular braiding”为题,发表在《International Journal of Extreme Manufacturing》(影响因子21.3,位列工程/制造学科领域第一)。我校为唯一完成单位,尚祖峰特聘副教授为论文第一作者,李秦川教授为论文通讯作者。
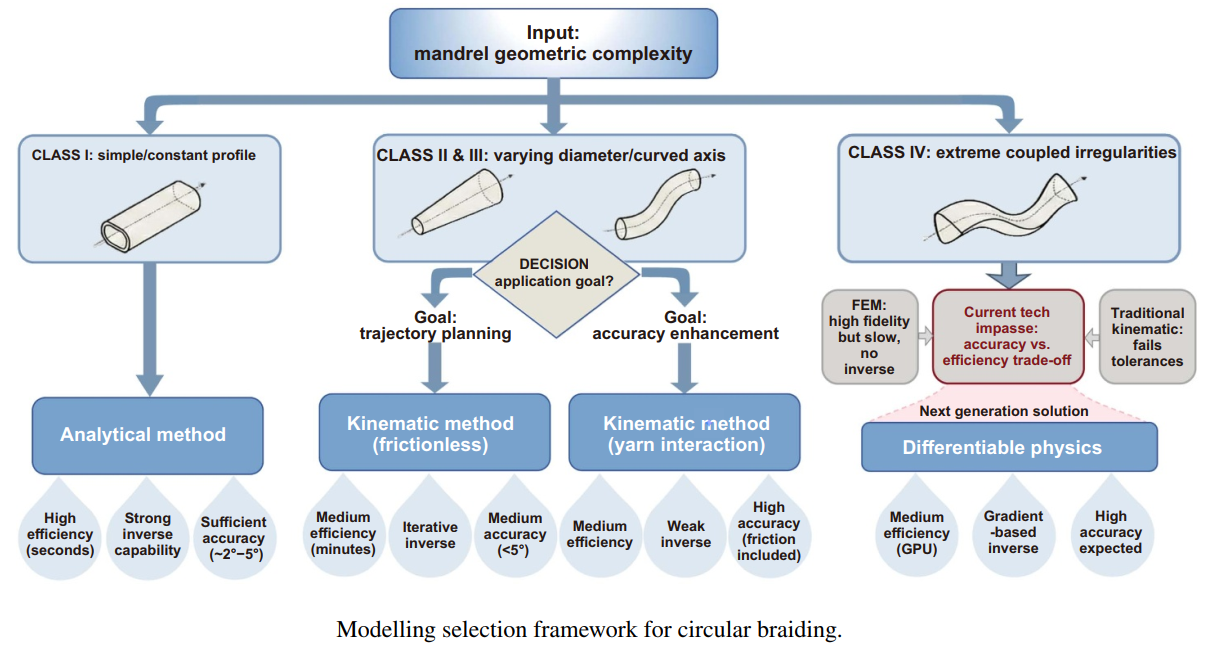
论文聚焦大型复杂异形复合材料环形编织制造中的几何定义、工艺建模与智能制造等关键问题,首先提出了面向大型复杂异形复合材料编织制造的几何不规则性四级分类体系,将编织构件按几何拓扑特征划分为Class I至Class IV,为复杂构件工艺适应性评估和制造难点判定建立了基础框架。该分类体系有助于厘清“复杂异形结构”的内涵,并为建模方法选择、机器人轨迹规划和工艺参数优化提供依据。
在工艺建模方面,论文系统比较了解析模型、运动学模型和有限元模型在不同复杂几何构件中的适用范围、计算效率和误差来源。研究指出,传统模型在简单或中等复杂构件中具有一定优势,但在多特征耦合和局部奇异等极端几何条件下面临明显局限。针对Class IV复杂构件制造难题,论文进一步讨论了可微物理引擎、材料点法等新型求解方法在高保真建模与反向工艺优化中的潜力,提出通过混合建模策略平衡计算效率、物理精度和工艺优化需求。
在制造装备与智能制造方面,论文分析了大型复杂构件编织过程中尺度效应导致的系统动态耦合、非线性摩擦累积和张力波动等关键挑战,展望了高刚度机器人系统、主动张力控制、磁悬浮载纱驱动、实时感知与自适应控制等未来发展方向,并提出融合数字孪生、人工智能和实时感知的智能编织制造路线,推动机器人编织从“几何驱动制造”向“性能驱动制造”转变。
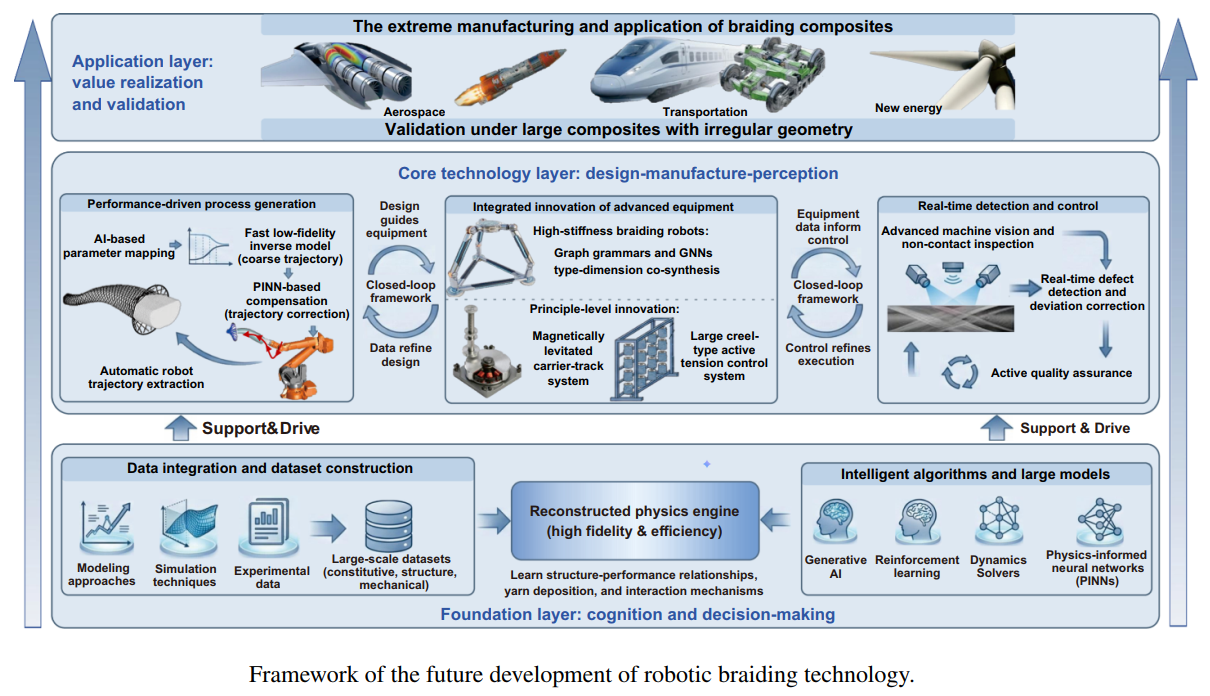
该综述从几何分类、工艺建模、装备创新和智能制造等层面构建了大型复杂异形复合材料环形编织制造的系统性框架,为突破大型变曲率复合材料结构件高效、精确、可靠制造瓶颈提供了理论参考和发展路径。相关研究对提升我国航空航天、国防军工、轨道交通等领域大型高性能复合材料构件的自主制造能力具有重要意义。该研究获得国家自然科学基金联合基金项目、青年科学基金项目(B类)的资助。
论文链接:https://doi.org/10.1088/2631-7990/ae6bdf
第一作者尚祖峰,浙江理工大学机械工程学院特聘副教授、硕士生导师。主要研究方向为机器人编织制造、柔性/连续体机器人与微创手术器械。近年来以第一作者或通讯作者在IJEM、TMECH、TWS等期刊发表论文十余篇,授权专利十余项。主持国家自然科学基金青年项目、浙江省自然科学基金青年项目等科研项目。




 学院动态
学院动态